- לאחרונה

שדה יישומים : Rosmaster X3 מספק מודל חקר לאנשי מקצוע, יכול ללמוד אלגוריתמים, להשיג שטח בתחום לא ידוע, יכול ללמוד עמוקות זיהוי חזותי של AI, מחקר אוטונומי, לחקור זיהוי אובייקטים תלת -ממדיים וכו '. פיתוח Media
Pipe : דרך מסגרת פיתוח Media
Pipe, פונקציות גילוי ידיים, גילוי יציבה, גילוי כולל, איתור פנים, איתור תלת מימד והכרה. זהו רובוט ROS מקצועי התומך בפיתוח רב יותר. חומרי קורס עשירים וצוות התמיכה המקצועי לאחר המכירה : אנו מספקים 103 קורסי וידיאו בשפה כפולה וסיוע טכני מקוון (Time Time).ערכת למידה רובוטית של ROS לגרסאות מרובות : Yahboom מספקת 4 גרסאות לוח פיתוח של Rosmasrer X3, אתה יכול לבחור בחופשיות את Jetson Xavier NX, Jetson TX2-NX, Jetson Nano או Raspberry Pi 4
B, על סמך סוגיות הביצועים השונות של לוחות הפיתוח הללו, חלקה של הפעולה שווה לקחת בחשבון, Yahboom ממליץ על Jetson TX2-Nx חסכוני. בקרת סנכרון מרובי-רובוט : ידית אחת שולטת ברובוטים מרובים בזמן אמת, משלימה תנועות מסודרות ואחידות ומבין את הפונקציה של השליטה הסינכרונית. הימנעות מכשולים של LIDAR : LIDAR מגלה את הסביבה הסובבת בזמן אמת ומתכנן אולמות כדי להימנע ממכשולים. ייפוי תמונה חזותית : תמונת הווידיאו הופכת על ידי Open
CV, והאלגוריתם המתאים משמש להשגת ההשפעה של יופי תמונה. טייס אוטומטי : תומך בבחירת צבע בהתאמה אישית, והרובוט יכול לזהות אוטומטית את אזור הצבע כדי לעקוב אחר הקו. מיפוי Orbslam2 : אתחול אוטומטי לחלוטין בשיטת מיצוי תכונות אורב. שומר לידר : יעדים הקרובים יותר ללידר יינעלו, וחזית מכונית הרובוט תמיד תתמודד עם היעד הזה. ו ו 1) חומר סגסוגת אלומיניום, גלגלי Mecanum 360 ° תנועה כל -כיוונית. כל הפיתוח המעמיק צריך להסתיים על ידי הלקוחות עצמם. משתמשים יכולים להתפתח וללמוד שוב בקורסים הקיימים. RTAB-MAP תלת ממדי מיפוי ויווט חזותי : באמצעות אלגוריתם RTAB לשילוב ראייה ורדאר, הרובוט מממש מיפוי ויזואלי תלת ממדי ויניוט ומכשולים, ותומך בהעברה גלובלית ומיקום אוטונומי. זיהוי/מעקב צבעוני : בחר אזור צבע ספציפי במסך ותן לרובוט לעקוב אחר צבע זה בזמן אמת. זיהוי תגית AR : הוא תומך במעקב דינאמי וגילוי של תוויות קוד QR, ומשיג את קואורדינטות התנוחה של קוד QR בזמן אמת. 6) שיטות שלט רחוק שונות כמו אפליקציית טלפון נייד, ידית, מערכת ROS ומקלדת מחשב. Orbslam2+מיפוי Octomap : Orb-Slam2 הוא מסגרת SLAM של קוד פתוח התומכת במצלמות Monocular, Binocular ו- RGB-D. חקר מעמיק של אלגוריתמים AI ורובוטים אינטליגנטים : Rosmasrer X3 מצויד במצלמה מעמיקה, לידר ומודול אינטראקציה קולי, שיכול לממש מערכת הפעלה של ROS, ניווט מיפוי תלת מימד של RTAB, PCL Point Cont יישומים, בקרה אינטראקטיבית קולית, תכנות פייתון, פיתוח STM32, פיתוח Media
Pipe, אימוני מודל יולו, תאוצה של Tensorrt (הערה : תכונות שונות תלויות בגרסה שתבחר). הוא מצויד במעקר, מצלמה עומק, מודול אינטראקציה קולית ומודולי חומרה אחרים בעלי ביצועים גבוהים. 4) שימוש ב- Orbslam2+Octomap, אלגוריתמי RRT כדי להשיג ניווט מיפוי תלת מימד ומיקום אוטונומי. Rosmaster X3 הוא רובוט חינוכי המבוסס על מערכת ההפעלה של הרובוט עם גלגל Mecanum, התואם ל- Jetson Nano/Xavier NX/TX2 NX ו- Raspberry Pi 4
B. תצורת חומרה מעולה : גוף סגסוגת אלומיניום, 360 ° גלגלי mecanum onmnidectional, Li
Dar אופציונלי, מצלמת עומק באיכות גבוהה, מודול אינטראקציה קולית אופציונלית, לוח התפשטות מעוצב באופן מקצועי. מיפוי וניווט של LIDAR הימנעות : זה יכול לממש GMapping, Hector, Karto, אלגוריתמי מיפוי קרטוגרף, תכנון תמיכה בנתיב, הימנעות מכשולים דינאמיים, ניווט בודד וניווט רב-נקודה. מעקב יעד KCF : מתאם תמונה מבוסס אלגוריתם KCF יכול לבחור כל אובייקט בתמונה ולעקוב אחר היעד בזמן אמת. RRT בוחן ובונה מפות באופן עצמאי : קבע את אזור החקירה, ומשתמש באלגוריתם RRT כדי לממש חקר ומיפוי אוטונומי, חיסכון במפות ולחזור לנקודת המקור. 7) יינתנו 103 הדרכות וידאו מפורטות וקודי קוד פתוח, כמו גם עזרה טכנית מקצועית. 2) תצורת חומרה מקצועית, LIDAR, מצלמת עומק, מודול אינטראקציה קולית וכו '.
מחזיק סוללה על סיפונה, ספקי חשמל מרובי חשמל זמינים כל ה i OS נגישים להרחבה קלה משלב CP2102 לניפוי באגים נוריות
ספק כוח : DC12 / 24 / 36 V 3 A, AC 125 V 8 A ~ 240 V 5 A ברירת מחדל במתג (מחובר בפנים) שרשור : 1 / 8 NPT, חוט DIA : 10 מ"מ מה שכלול : 1 x 120 /
פלאש 4 מגה בייט מדריך למשתמש : https : / / docs.espressif.com / projects / espressifespdevkits / en / latest / esp8684 / esp8684devkitm1 / index.html...
CPUMODEL : Rockchip RK3399, מספר הליבות : CortexA72 + CortexA72 של 64 סיביות, תדר : CortexA72 (עד 2.0 GHz), CortexA53 (עד 1.5 GHz)...
מבודד USB : מבודד USB זה מגן על ממשק התקשורת בין מארח (כגון מחשב) לבין ציוד היקפי שלו אתה יכול להפחית את ההפרע�
*כאשר יישום האירוח ESP8285, ניתן להתחיל ישירות מההבזק החיצוני זיכרון מטמון מובנה מקל על ביצועי המערכת ומייע�
המקרה תומך במסך מגע של Raspberry Pi (3.5 אינץ ') או למאוורר הקירור מאוורר נקיר חום מגיע עם ברגים, אתה יכול להתקין א
ATMEGA 32 U4 פועל במהירות 5 V / 16 MHz נתמך תחת Arduino Ide v1.0.1 מחבר מיקרו USB על גבי התכנות סיכות ADC של 4 x 10 סיביות 12 x I / OS די
מארז לוח CM4 IO זה מיועד למודול מחשוב Raspberry Pi Compute 4, Waveshare CM4IOBaseC (ver מתקדם) בפנים, מהיר וקל לבניית מינימחשב...
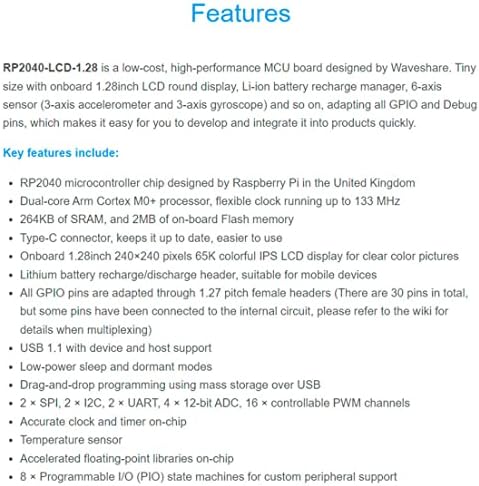
שבב מיקרו בקר RP2040 מעוצב על ידי Raspberry Pi בבריטניה מעבד Cortex M0+ של Cortex M0+, שעון גמיש הפועל עד 133 מגה הרץ 264 KB של SRAM
לוח פיתוח מגן SIM800 C עבור במקום SIM900 מודול GPRS GSM 4 תדר זמין עם אנטנה עבור Raspberrp Pi RPI לוח פיתוח מגן SIM800 C עבור במק
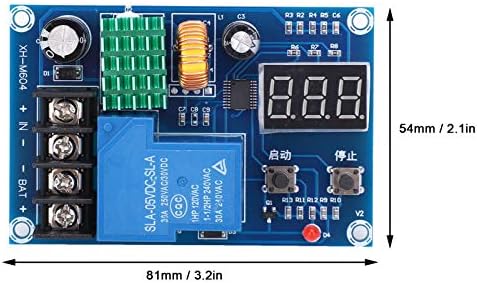
אופן השימוש לדוגמה, לטעינת סוללה של 12 וולט, טווח מתח הטעינה הוא 10.814.4 וולט, ומתח ההתחלה מוגדר ל 10.8 וולט...
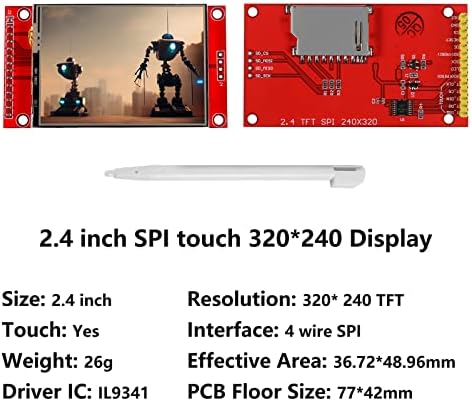
2.4 אינץ '320x240 פיקסלים RGB תצוגת לוח TFT צבעונית מסך TFT בגודל 2.4 אינץ 'יש שקע כרטיס SD בגב המסך הזה 320x240 מודול תצוג
מינימום פיתוח מערכת פיתוח מודול ARM STM8 S103 F3 P6 STM8 עבור Arduino פיתח זמן אספקה מוערך במדינה : 718 ימים לפי קו מי�
Arducam Mini Module Shield Shield 5 MP פלוס OV5642 מודול מצלמה הוא מצלמת SPI 5 MP SPI בגודל 5 MP מטרה גבוהה, המפחיתים את המורכבות של �
קל להרכיב EAS להגדיר קטן ונייד אין צורך בהלחמה 100% איכות ל BPI M2 אין ממשק SATA אם אתה צריך לגשת לדיסק הקשיח אנ
איכות המוצר טובה אנו רכיבים אלקטרוניים מקצועיים ויצרן מודולים אתה יכול לחפש מילות מפתח בחנות שלנו...
שמור על מעבד קריר : ככל שמעבד עסוק יותר הוא מתחמם יותר, מה שמוביל לביצועים תת אופטימליים כדי למנוע סוגיה נ
בנה בקלות NAS משלך / שרת מדיה מבוסס על Raspberry Pi 4 בנה בקלות NAS משלך / שרת מדיה על בסיס Raspberry Pi 4 Quad Sata Hat ערכה עב�
מתאים ל Raspberry Pi Zero 2 (לא כלול) חומרים באיכות גבוהה עם חומרה מותאמת אישית מפלדת אל חלד גזרו אאוטס לגישה נוחה
מתאם וידאו לכידת כרטיס, עבור משחקים / הזרמת / מצלמות, כדי יו אס בי שימוש קל עם מארחים שונים כמו : טלפון חכ�
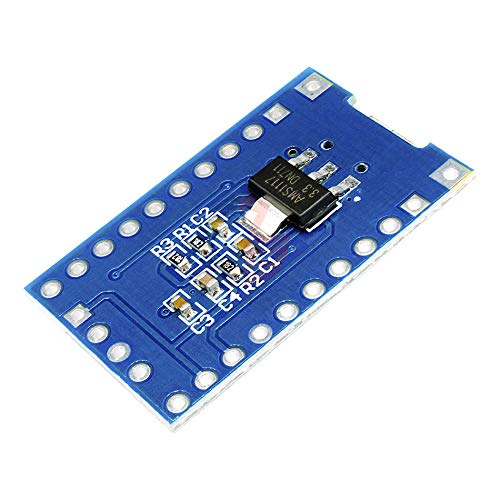
תיאור : 1 ברנד חדש ואיכותי 2 מודול אספקת חשמל לוח, התואם 5 וולט, 3.3 וולט החל על לוח MB102 לוח מתח פלט : 6.512 וולט (DC)